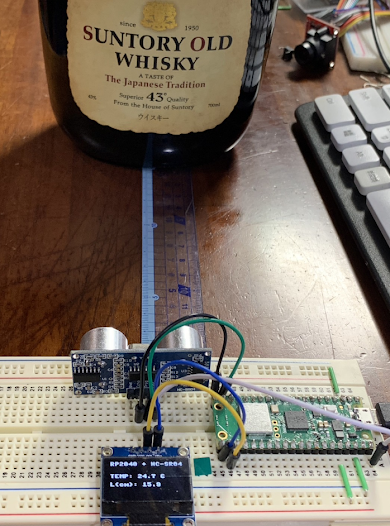
HC‑SR04 超音波距離センサを Raspberry Pi Pico から制御し、OLED(SSD1306 128×64)にリアルタイム表示するデモを MicroPython で作成します。センサが発した超音波が物体で反射し戻るまでの往復時間を計測し、Pico 内蔵温度センサで取得した気温を用いて音速を補正することで、測定精度を高めます。
配線(GPIO ピンアサイン)
| 機能 | デバイス | Pico GPIO |
|---|---|---|
| SDA | OLED (I²C id 0) | GP16 |
| SCL | OLED (I²C id 0) | GP17 |
| TRIG | HC‑SR04 | GP14 |
| ECHO | HC‑SR04 | GP15 |

この構成で、約 0.3 秒ごとに “気温・距離” を更新しながら OLED に表示する MicroPython サンプルを実装します。
ライブラリのインストール(Thonny)
-
Pico W を PC に接続し、Thonny を開きます。
-
メニュー [ツール] → [パッケージを管理..] をクリック。
OLED 用ライブラリ
-
検索窓に
ssd1306と入力 →micropython-ssd1306を選び Install。
(詳しい手順や日本語解説は、前回の記事を参考にしてください)
ソースコード
from machine import Pin, ADC, I2C, time_pulse_us
import utime
import ssd1306
# ── GPIO 設定 ──────────────────────────────────────────────
TRIG = 14
ECHO = 15
SDA = 16
SCL = 17
trigger = Pin(TRIG, Pin.OUT)
echo = Pin(ECHO, Pin.IN)
# ── OLED 初期化 ────────────────────────────────────────────
i2c = I2C(0, sda=Pin(SDA), scl=Pin(SCL), freq=400_000)
oled = ssd1306.SSD1306_I2C(128, 64, i2c)
oled.fill(0)
oled.text("RP2040 + HC-SR04", 0, 0)
oled.text("TEMP: C", 0, 24)
oled.text("L(cm):", 0, 40)
oled.show()
# ── 内部温度センサ ────────────────────────────────────────
adc = ADC(4)
VREF = 3.3
COEFF = VREF / 65535
def read_temperature():
"""内部温度センサから気温 (°C) を返す"""
v = adc.read_u16() * COEFF
return round(27 - (v - 0.706) / 0.001721, 1)
# ── HC‑SR04 距離計測 ─────────────────────────────────────
def read_distance(temp):
"""
距離 (cm) を返す。タイムアウトなら None。
temp: 気温 (°C) — 音速計算用
"""
trigger.low()
utime.sleep_us(2)
trigger.high()
utime.sleep_us(15) # ≥10 µs 必要
trigger.low()
# 30 ms タイムアウト (≈5 m)
t = time_pulse_us(echo, 1, 30_000)
if t < 0:
return None
vs = 331.5 + 0.6 * temp # 音速 (m/s)
return round(vs * t / 20000, 1) # 往復 → 片道換算
# ── OLED 表示ユーティリティ ───────────────────────────────
def show_value(x, y, width, text):
oled.fill_rect(x, y, width, 8, 0)
oled.text(text, x, y)
# ── メインループ ─────────────────────────────────────────
while True:
temp = read_temperature()
dist = read_distance(temp)
show_value(48, 24, 40, "{:>4}".format(temp))
if dist is None or dist > 400: # HC‑SR04 公称最大 4 m
show_value(48, 40, 56, "----")
else:
show_value(48, 40, 56, "{:>5}".format(dist))
oled.show()
utime.sleep(0.3) # 更新周期(好みで調整)
コメント
コメントを投稿